Artificial intelligence

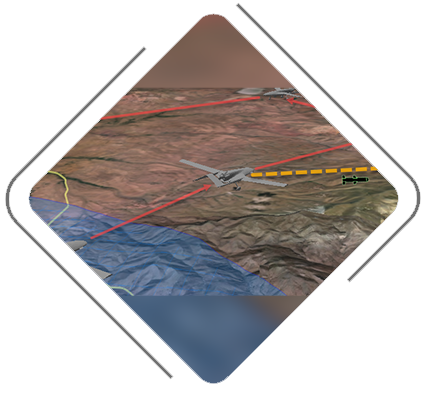
Visual Posture Detection
Visual detection project, using high-tech artificial intelligence systems, was developed to detect aircraft's tilt, upwards-downward and orientation angles without the need for any external sensors or Global Positioning System (GPS).
Features
- Automatic control of aircraft by artificial intelligence in case of Global Positioning System loss or sensor failure
- Warning system when aerial vehicle exceeds given orientation angle limits and, when needed, enabling pilot to take over the control of UAV.
- Continuous learning and progressing artificial intelligence model
- Improvement of the model with data gathered from sensors during flight

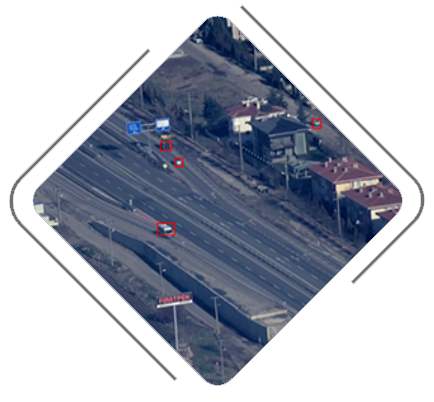
Basic Object Detection
In this project, it is aimed to identify the objects identified by the image data obtained from the UAV's tail camera. Latest deep learning technology models have been applied.
Gimbal Object Detection
In this project, the aim is to detect and track the objects and data identified with the help of the high resolution image data received from gimbal.

Operation Beyond the Line of View
It is intended to assist the landing of the UAV using images with the Visual Landing System.
Landmark Recognition
UAVs use conventional positioning systems to detect their position in the world. Thanks to the Landmark Recognition project, UAVs will gain the ability to calculate their position according to known marked locations, to navigate without the support of Global Positioning System and other similar systems.
